Robots equipped with artificial intelligence systems to monitor Posidonia oceanica meadows and protect the health of marine ecosystems: this is the outcome of the PANACEA project, carried out over the past two and a half years by the Universities of Pisa and Florence and funded by the Italian Ministry of University and Research under the PRIN2022 programme.

The experimental phase took place both in freshwater environments and on the seabed between Cecina and Livorno. Here, researchers tested a team of intelligent robots capable of communicating with one another: the underwater drone Zeno, developed by the University of Pisa, and FeelHippo, developed by the University of Florence as an autonomous surface vehicle.
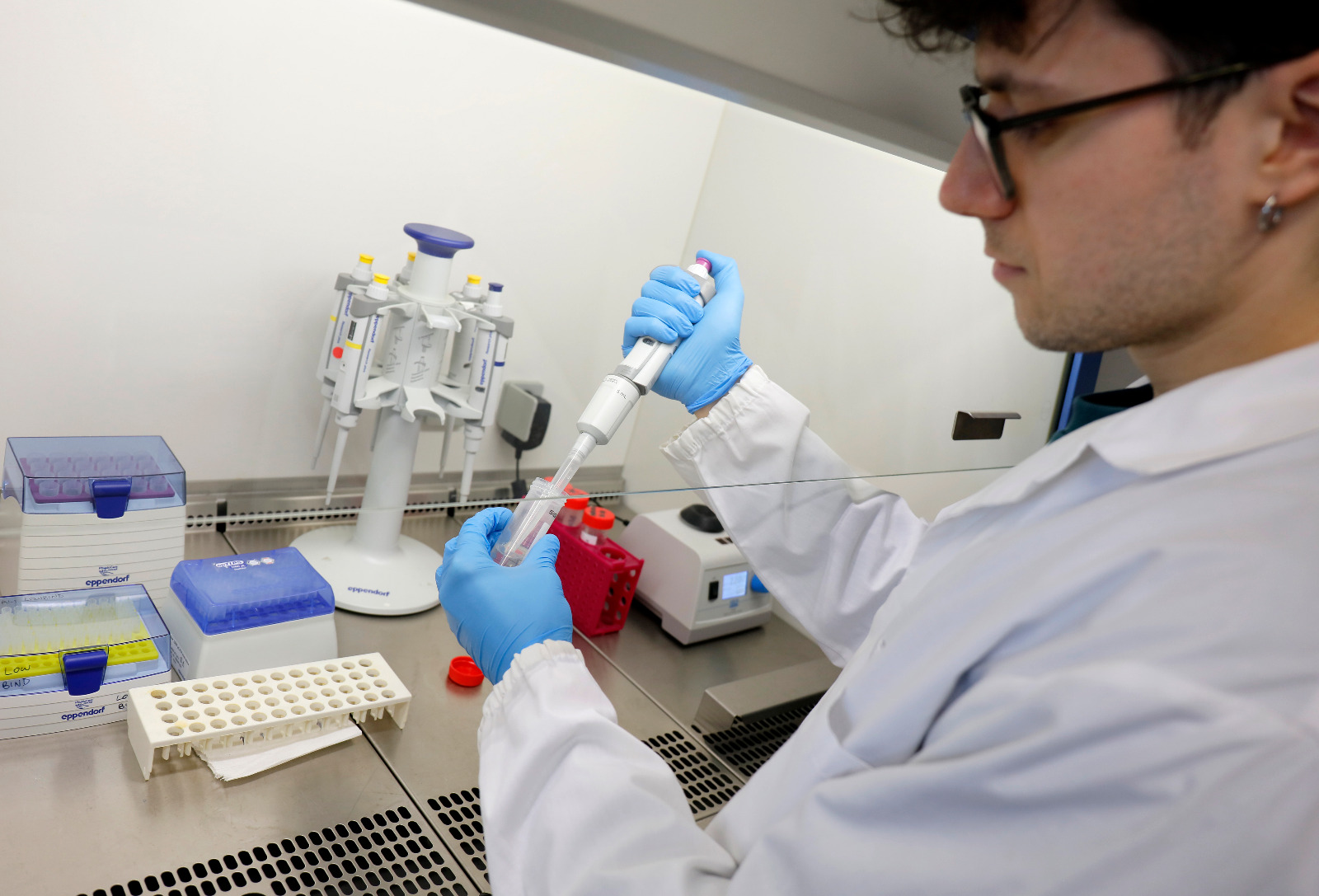
The robots can autonomously follow the edge of Posidonia meadows, while optical and acoustic images of the seabed are processed directly on board using artificial intelligence algorithms.
“One of the project’s main achievements,” explains Riccardo Costanzi, Professor of Robotics at the University of Pisa, “was the use of artificial intelligence algorithms for the automatic recognition of different seabed types. Our robots learned to distinguish sandy and rocky seabeds, as well as the presence of live and dead Posidonia oceanica. Until now, monitoring the meadows of this plant — which is fundamental for the health of marine ecosystems — has mainly relied on human divers who, besides operating at high cost and risk, can only cover limited areas.”

According to the researchers, the advantages of this robotic solution include the precision of the surveys, ease of use, low operating costs, and the possibility of repeating the same routes over time.
“Since GPS cannot be used underwater,” continues Alessandro Ridolfi, Professor of Robotics at the University of Florence, “the PANACEA project proposes an innovative robotic system based on cooperation between an autonomous underwater vehicle (AUV) and an autonomous surface vehicle (ASV). While the underwater vehicle collects data on Posidonia, the surface vehicle maintains an acoustic communication channel with it. This makes it possible to determine the precise position of the underwater vehicle and display its processed data on a graphical interface on a computer located onshore.”

Thanks to this system, operators can monitor the progress of the mission and the state of the observed environment in near real time, without needing to directly control the vehicle. The entire system represents a complete and integrated infrastructure, an example of collaboration between robotics engineering and marine biology.